
ПИД – это регулятор, осуществляющий пропорциональное, интегрирующее и дифференциальное управление. ПИД регуляторы находят широкое применение в современных системах точного контроля, таких как управление термосистемами.
На вход регулятора подаётся измеренная датчиком физическая величина (температура, влажность и т.д.), регулятор в соответствии со своим алгоритмом (реализующим функцию преобразования) выдаёт управляющее воздействие. Это вызывает изменение регулируемой величины (например, температуры или влажности). На следующем шаге регулятор снова делает замер регулируемого параметра и сравнивает эту величину с заданной, вычисляя ошибку регулирования. Новое управляющее воздействие формируется с учётом ошибки регулирования на каждом шаге. Значение величины, которое нужно поддерживать, задаётся пользователем.
Структурная схема ПИД-регулятора
В схематическом варианте ПИД-регулятор выглядит так:
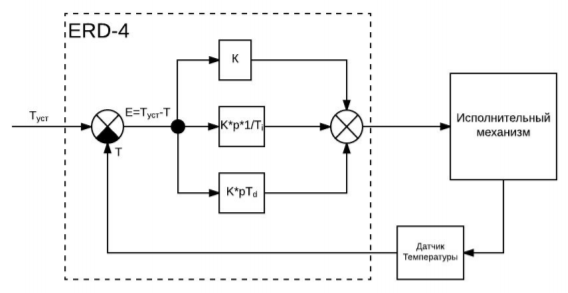
Рисунок 1
В системе ПИД-регулятора имеется три составляющие: интегральная, пропорциональная и дифференциальная. Каждая из них имеет соответствующий коэффициент (К). Чем больше коэффициент, тем больший вклад данная составляющая вносит в работу регулятора.
Пропорциональная составляющая
Пропорциональная составляющая просто умножает величину ошибки на свой коэффициент. Например, чем больше заданная температура по сравнению с текущей, тем большее напряжение будет на выходе устройства.
Интегральная составляющая
Интегральная составляющая необходима, чтобы учитывать предыдущий опыт работы регулятора и делать управление всё точнее и точнее со временем. Регулятор суммирует все предыдущие значения ошибки регулирования и делает на них поправку. Как только система выйдет на заданный режим (например, достигнет заданной температуры) ошибка регулирования будет близка к нулю и интегральная часть со временем будет всё меньше влиять на работу регулятора. Говоря простым языком, интегральная составляющая стремится исправить ошибки регулирования за предыдущий период.
Ti - интегральная составляющая.
Дифференциальная составляющая
Эта составляющая берёт производную от измеряемой величины. производная - это скорость изменения физической величины. Например, чем быстрее растёт (или падает) температура в системе, тем больше будет соответствующая производная. Дифференциальная составляющая позволяет регулятору по-разному реагировать на резкие и плавные изменения регулируемой величины в системе, тем самым избегая «раскачивания» этой величины.
Td - дифференциальная составляющая
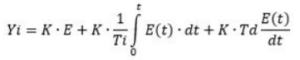
Пример использования ПИД-регулятора на основе SNR- ERD-4
Допустим, необходимо реализовать проветривание помещения следующим образом: чем больше температура внутри, тем больше нужно открыть заслонку
вентиляции. Для этого установим на вентиляцию привод, который будет плавно поворачиваться, а управляться будет сигналом напряжения. Для измерения температуры можно взять SNR-DTS-2. Для управления заслонкой подойдёт электропривод DA04N24P.
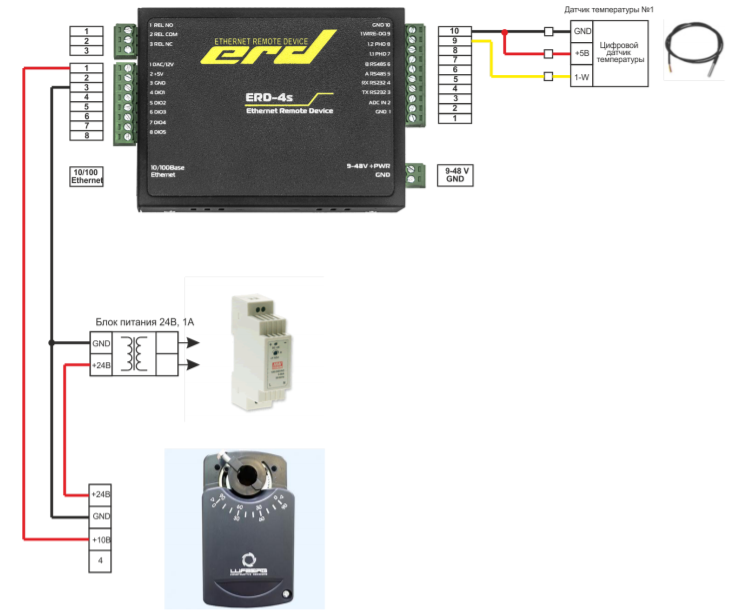
Рисунок 2
Настройка ПИД-регулятора - довольно сложный и трудоёмкий процесс. На практике достаточно тяжело достичь оптимального регулирования и зачастую в этом нет необходимости. Чаще всего достаточно добиться такого вида переходного процесса, который устроит пользователя в условиях текущей задачи.
Настроим DAC/12V в режим аналогового выхода. В разделе “Настройки” - “Настройки входов/выходов”
Рисунок 3
ПИД-регулятор настраивается в WEB-интерфейсе устройства в разделе “Сервисы”- “ПИДрегулятор”
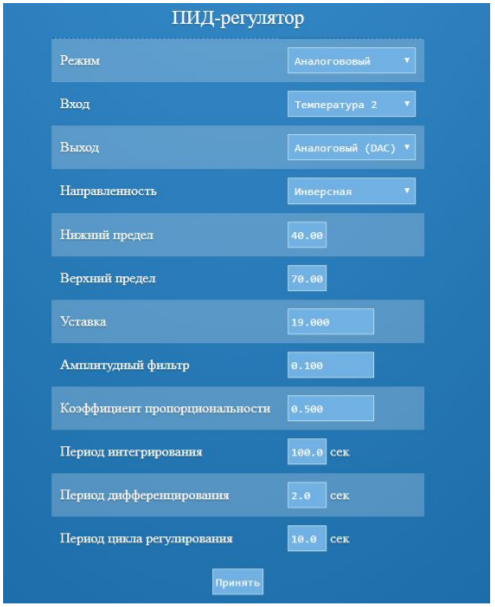
Рисунок 3
На рисунке 3 показаны настройки ПИД-регулятора.
1. Режим:
Аналоговый (в данном случае режим работы ПИД - аналоговый);
ШИМ;
Отключен.
2. Вход:
Напряжение (AC);
Датчик температуры (выбирается один из 10 возможных);
Ввод через SNMP.
3. Выход:
Аналоговый выход (DAC);
Реле;
DIO (1 из 5).
4. Направленность:
Неинверсная;
Инверсная (в данном случае).
Направление изменения выходного сигнала, когда начальный входной сигнал меньше заданного - Неинверсная, наоборот - инверсная.
5. Нижний предел (в процентах);
6. Верхний предел (в процентах).
7. Уставка:
Задается входное значение на ПИД (в данном случае 19 градусов Цельсия);
Амплитудный фильтр (для снижения колебаний контура);
Коэффициент пропорциональности (К);
Период интегрирования (Ti) в секундах;
Период дифференцирования (Td) в секундах;
Период цикла регулирования (t) в секундах.
Описание OID и их значений
-inputPID
Для ввода данных для расчета ПИД, по SNMP
snmpset -v1 -c public .1.3.6.1.4.1.40418.2.6.11.10.1.0
Задаётся в формате INTEGER
-outputPercentPID
Вывод данных с ПИД в процентах.
snmpget -v1 -c public .1.3.6.1.4.1.40418.2.6.11.10.2.0
-outputRealPID
Вывод данных с ПИД в указанной на выходе величине.
snmpget -v1 -c public .1.3.6.1.4.1.40418.2.6.11.10.3.0
-ypPID
Пропорциональная составляющая ПИД
snmpget -v1 -c public .1.3.6.1.4.1.40418.2.6.11.10.4.0
-yiPID
Интегральная составляющая ПИД
snmpget -v1 -c public .1.3.6.1.4.1.40418.2.6.11.10.5.0
-ydPID
Дифференциальная составляющая ПИД
snmpget -v1 -c public .1.3.6.1.4.1.40418.2.6.11.10.6.0
-errorPID
Ошибка ПИД регулятора
snmpget -v1 -c public .1.3.6.1.4.1.40418.2.6.11.10.7.0